Ongoing Research Topics(English)
人とつながる制御システム の構築を目指して
Building control and architecture design for Cyber-Physical Human Systems (CPHS)


(&Decision) 社会システムの中での意思決定の適正化
サービスの受容者である多様な人類や自律化された機械が混在する社会システムの中で,時々の環境変化に適した意思決定・制御方策の在り方を検討しています.特にカーボンニュートラル実現のために下記テーマを研究しています.
 |
For better decision mechanism in smart city
先進的まちづくりのために意思決定・制御を伴う市場メカニズム設計論を構築しています. 特に,電力エネルギー分野の応用研究を行い,実体や金銭だけでなく情報や価値・リスクを含めたシェアリングエコノミーと交渉過程をキーワードに分析しています.
解説記事:
VPP計画運用,市場入札,スマートシティ
|
 |
For better decision mechanism in community
脱炭素化に向けた地球レベルの環境合意形成は街,国内,国際間など様々な規模で求められています. 動学的環境協定の施策に関して制御学と環境経済学の視点から理論と数値両面で分析しています. 特に,大規模シミュレーションの高速実装を検討しています. |
(&Control) 先駆的システム制御理論の基盤創出
講義では「動特性を持つ対象(動的システム)の制御は,システムモデリング,システム解析,制御系設計を通して実現する」と話します. この培われてきた本質的な見方・考え方(制御哲学)を受け継ぎつつ,時代のニーズに伴う新技術や制約を取り入れた次世代制御システムのあるべき姿について,工学的に役立つ先駆的な理論体系化を探求しています.
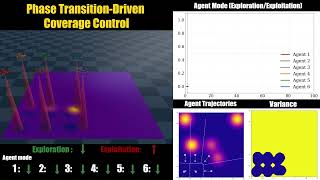
Phys.-Inspired Coverage |
For faster and more elegant control in real-world
現実を捉えた観測データと物理系の数理モデル構造の利点を融合し,最適制御理論と先端的機械学習手法を組み合わせたアプローチで実時間予測と最適制御の新たな制御系設計法を開発している. 主要関連論文: PINN-based control (MSCS25), Physics-inspired coverage (IFAC-WC26), MINLP-based optimization (IFAC-WC26), CBF-based control (SICE-JCMSI25), Dynamic topology-ID (IFAC-WC23) |
|
 |
For smarter biomedical control systems synthesis
生体医療における数理モデルによる治療プロトコルの確立を目指し,バイタルサインなど計測可能な情報を集約しながらシステム生物学の知見を取り入れ,糖尿病をはじめとする系統的最適治療戦略のための身体内・病理の数理モデル構築に取り組んでいる. 主要関連論文: Diabetes (JACC25, T-SICE25, IFAC-WC23, JTB18), Depression (JACC17), Septic shock (TBMM19) |
(&Architecting) 先端情報技術を併用したシステム制御設計
ロボティックス分野や社会インフラ分野における物理空間のオープンデータプラットフォームが整備され,サイバー空間の先端情報処理技術もオープンソース化が標準である. 一方で,ネットワーク制御や人が介在した実時間制御のための環境構築は発展途上である. 以下の研究テーマを通して制御システムの次世代環境構築を開拓している.
 |
For developing eco-control systems
信頼性,安全性,利便性を両立するために上記オープン技術を含めたEnd2End実装可能なエコ制御システム環境開発整備と物理AI制御系設計法をCPHSの各観点から研究開発している. 特に,先端情報技術をどのように組み入れることができるかを積極的に試している. 主要関連論文: IFAC-WC26, IFAC-MSROB25, JACC23, T-SICE20 |

UAV Control via 3DGS |

VLA-like Control in MR |
 |
 |
For guidance and control ensuring crowd safety
人間の行動は気まぐれであるという前提のもとで混雑や衝突回避を実現する自律移動体の制御法や群衆意思決定の誘導方策を探求している. 特にReal2Sim2Realの実時間適用を具体化した新たなデータ(情報)モデル(数理)併用駆動制御を開発している. 主要関連論文: Navigation in-crowd (IFAC-WC26), Crowd control (SCI26), Nudging social decision (Automatica23, T-SICE22, IFAC-CPHS20) |
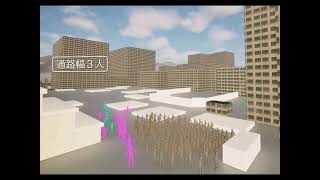
Pedestrian Control |
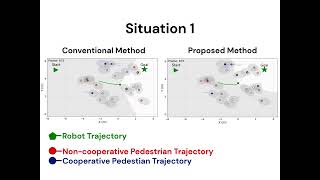
Robot Control in Crowd |
 |
For embodied human-swarm control
人間と協働・融和しながら移動体の群制御を実現する階層分散制御法を探求している. 特に,安全保障を前提に人間の五感による認識や学習,指示の利活用と人-機械の自動化レベルをシステム構築論として再解釈を試みている.
解説記事:
ネットワークロボティクスのメカニズム設計
|

Swarm VR-Control |

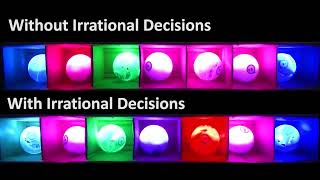
Illusion-based Control |
Swarm LLM-Control 1 |

Swarm LLM-Control 2 |
Completed Projects
(2020-2026) 統合メカニズム設計論の社会インフラシステムへの展開
 |
社会実装を実現するには,エージェント間の利害関係や主従関係,各エージェントの判断特性や行動変容条件,システムの動特性を考慮する必要がある. 最適制御理論・ゲーム理論/チーム理論・メカニズムデザインの知見に利権構造を数理的に統合し,インセンティブと対価となるサービスや責務を含めた妥結点と限界,利便性を探求した. 主要関連論文: Incentivizing control (ECC25, SCI25, ISCS24, CCTA22), Multi-physical control (T-SICE23, IFAC-WC23, IFAC-CPHS22), Traffic control (CDC20, ECC19, ASCC17) |
(2022-2026) 住宅街のZEH化に向けた電力シミュレータ開発
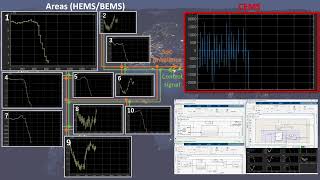
CEMS Simulator |
カーボンニュートラルの実現に向けたネット・ゼロ・エネルギー・ハウス(ZEH)への移行促進と社会実装のために,行動経済学と制御工学の知見を組み合わせ,蓄電池や太陽光発電導入量決定,建材特性,各住戸のエネルギー管理制御手法を環境・経済両面から評価する住宅街詳細電力シミュレータの構築を行った. 主要関連論文: Investment optimization (IEEE-ACCESS24, IET-RPG24, SICE-JCMSI24), CEMS control (JACC25, JACC24, JACC23) アウトリーチ活動: プレスリリース24 |
|
(2016-2020) Control Mechanism Design for Distributed EMS
内田健康先生の下でJST CREST EMS領域の研究課題として実施した.研究チームの概要はYoutube,研究成果は国際書籍 "Economically Enabled Energy Management"に編纂した.私たちの研究内容はシステム制御分野のVision Book "Smart Grid Control"に掲載されている.小売市場の実時間実装に向けた国際共同研究はIEEE Trans. Smart Gridに採録された.
主要関連論文: Springer18, Springer20, TCST22, RIEEM-DP20, TSG20, ASCC19, IET-SG19, ASCC17, T-SICE19, IFAC-WC20, ECC19, CCTA17
アウトリーチ活動: プレスリリース20, CREST EMS領域公開シンポジウム
 |
 |

PV for Econ EMS |
 |
 |
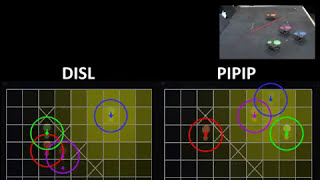
(2011-2016) Distributed Learning in Network Games
藤田政之先生の下で,ネットワーク化された自律移動ロボット・センサ群の協調最適化行動を非協力ゲーム的状況として捉え,ゲーム理論の枠組みで構築された分散協調学習則を構築した. 全体最適化を理論的に保証し,事前情報を必要としない学習則の利点を活かし,シミュレーションだけでなく実機実験を通して有効性を示した.

|

Landslide Monitoring |

Cloud Monitoring |

LiDAR-based Coverage |

Power Distribution |
Sensor Coverage 1 |

Sensor Coverage 2 |
Color Synchro |
Wasa's Completed Publication List
Copyright (c) Yasuaki WASA | All Rights Reserved.